大部分关于人形机器人的报道都集中在硬件设计上,这是可以理解的。考虑到开发人员经常提到“通用人形机器人”这个词,我们应该更多地关注硬件设计。在经历了几十年的单一用途系统之后,向更通用的系统迈进将是一个重大的飞跃。我们还没有到达那个地步。
推动开发能够充分利用双足类人机器人设计所开辟的广泛运动范围的机器人智能一直是研究人员关注的重点课题。生成式人工智能在机器人中的应用最近也成为一个热门话题。麻省理工学院的新研究指出了后者可能会对前者产生深远影响。
通用系统发展道路上最大的挑战之一是训练。我们掌握了训练人类如何完成不同工作的最佳实践。机器人技术的方法虽然前景光明,但却支离破碎。有很多有前途的方法,包括强化学习和模仿学习,但未来的解决方案可能会涉及这些方法的组合,并通过生成式人工智能模型进行增强。
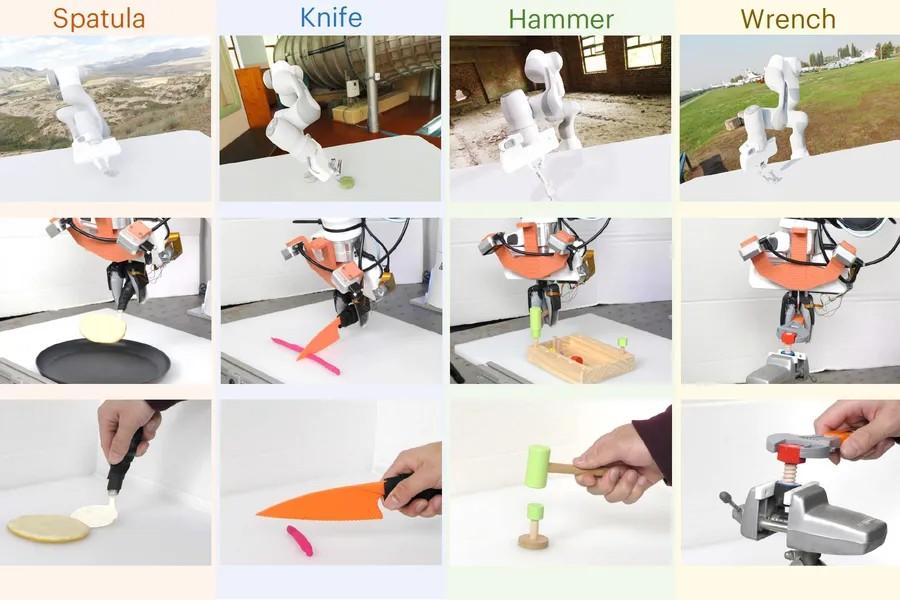
MIT 团队提出的主要用例之一是能够从这些小型、特定于任务的数据集中整理相关信息。这种方法被称为策略组合 (PoCo)。任务包括有用的机器人动作,例如敲钉子和用铲子翻转东西。
该学院指出:“[研究人员] 训练一个单独的扩散模型来学习使用一个特定数据集完成一项任务的策略或政策。” “然后,他们将扩散模型学习到的策略组合成一个通用策略,使机器人能够在各种环境中执行多项任务。”
根据麻省理工学院的数据,扩散模型的引入将任务性能提高了 20%。这包括执行需要多种工具的任务的能力,以及学习/适应不熟悉的任务。该系统能够将来自不同数据集的相关信息组合成执行任务所需的一系列操作。
“这种方法的好处之一是,我们可以结合各种策略,实现两全其美,”论文的主要作者王立睿说道。“例如,基于真实世界数据训练的策略可能能够实现更高的灵活性,而基于模拟训练的策略可能能够实现更高的泛化能力。”
这项具体工作的目标是创建智能系统,使机器人能够更换不同的工具来执行不同的任务。多用途系统的普及将使该行业更接近通用梦想。
本站全部资讯来源于实验室原创、合作机构投稿及网友汇集投稿,仅代表个人观点,不作为任何依据,转载联系作者并注明出处:https://www.lvsky.net/583.html
评论