 自动驾驶汽车不撞到行人、不撞到电线杆的关键是方向盘后面的人形机器人吗?东京大学的一组研究人员认为是的,他们在本周新发表的一篇技术论文中阐述了他们的论点。
自动驾驶汽车不撞到行人、不撞到电线杆的关键是方向盘后面的人形机器人吗?东京大学的一组研究人员认为是的,他们在本周新发表的一篇技术论文中阐述了他们的论点。
其中一位研究人员是丰田公司的顾问,他们开发并训练了一种名为 Musashi 的“肌肉骨骼人形机器人”,使其能够驾驶一辆小型电动汽车穿越测试跑道。
武藏配备了两个代替人眼的摄像头,可以“看到”前方的道路以及汽车后视镜中反射的景色。借助机械手,它可以旋转车钥匙、拉手刹和打开转向灯。此外,得益于防滑“脚”,武藏可以踩下油门或刹车踏板。
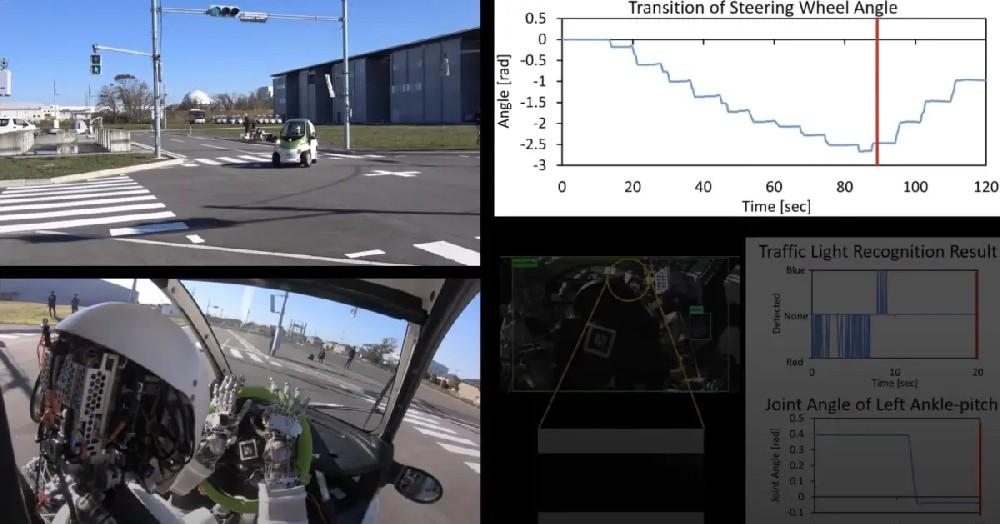
研究人员声称,通过向 Musashi 输入原始传感器数据,“教会”它如何使用汽车的方向盘后,它成功地让机器人在十字路口转弯时遵守交通信号灯。
但也有注意事项。
首先,武藏转弯时只是小心翼翼地将“脚”从刹车踏板上抬起,而不是踩下油门。研究人员表示,这是技术限制的结果,也是出于谨慎考虑——但结果,转弯花了大约两分钟。
研究人员表示,武藏在另一项实验中确实使用了加速器。但它很难保持一致的速度,这取决于道路坡度的陡峭程度。
显然,还有很多工作要做。幸运的是,研究人员表示他们已经准备好迎接挑战,并计划开发下一代机器人和软件。也许几十年后,武藏将成为您下一辆东京出租车的司机。
本站全部资讯来源于实验室原创、合作机构投稿及网友汇集投稿,仅代表个人观点,不作为任何依据,转载联系作者并注明出处:https://www.lvsky.net/582.html
评论